

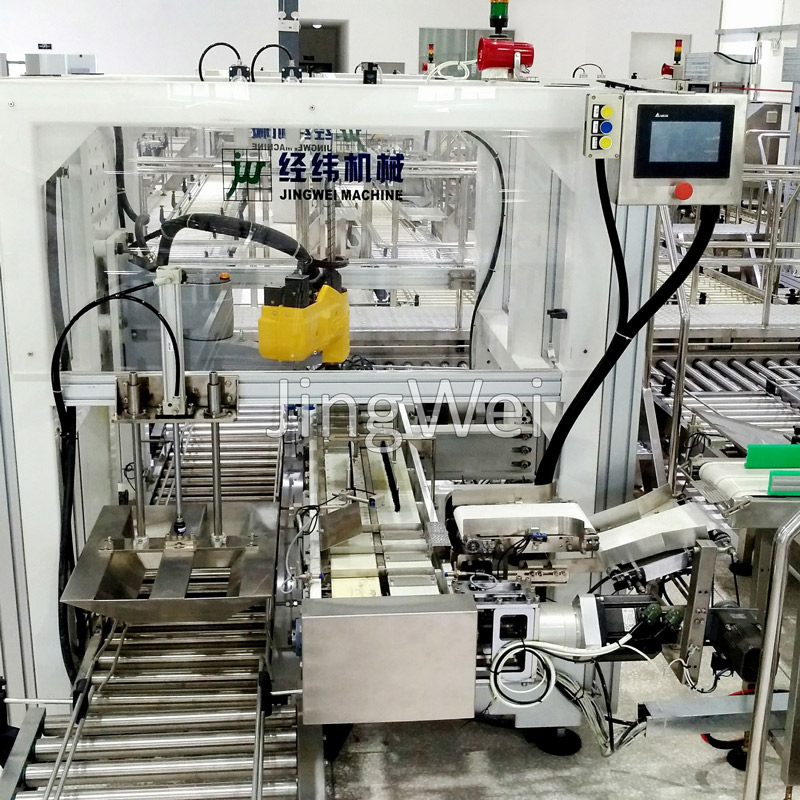
Robot gaplamak
Ine, robot gaplaýyş maşynynyň ýerine ýetirip biljek käbir umumy wezipeleri:
Saýlamak we ýerleşdirmek: Robot goly konweýerden ýa-da önümçilik liniýasyndan önümleri alyp, gutular, kartonlar ýa-da gaplar ýaly gaplaýyş gaplaryna ýerleşdirip biler.
Sortirlemek: Robot önümleri ululygyna, agramyna ýa-da beýleki aýratynlyklaryna görä tertipläp, degişli gaplamalara ýerleşdirip biler.
Doldurmak: Robot takyk mukdarda önümi gaplaýyş gabyna paýlap we paýlap biler.
Möhürlemek: Robot önümiň dökülmeginiň ýa-da syzmagynyň öňüni almak üçin gaplaýyş gabyny möhürlemek üçin ýelim, lenta ýa-da ýylylyk ulanyp biler.
Etiketleme: Robot önümiň jikme-jiklikleri, möhleti ýa-da partiýa belgileri ýaly möhüm maglumatlary bermek üçin gaplama gaplaryna bellikleri ýa-da çap kodlaryny ulanyp biler.
Palletizasiýa: Robot, taýýar gaplama gaplaryny ýörite nagyşlara we konfigurasiýalara laýyklykda paletlere ýerleşdirip biler, ibermäge ýa-da saklamaga taýyn.
Hil barlagy: Robot, gaplama gaplaryny hil gözegçiligini üpjün etmek üçin çatryklar, çukurlar ýa-da ýiten bölekler ýaly kemçilikleri barlap biler.
Umuman aýdanyňda, robot gaplaýyş enjamy gaplama prosesini awtomatlaşdyrmak, netijeliligi ýokarlandyrmak, zähmet çykdajylaryny azaltmak we gaplanan önümleriň takyklygyny we yzygiderliligini ýokarlandyrmak üçin köp sanly işi ýerine ýetirip biler.
Aýratynlyklary
1. Bu PLC we herekete gözegçilik, sero sürüjisi, HMI işleýşi, takyk ýerleşdirme we tizligi sazlap bolýar.
2. Tutuş gaplama prosesiniň awtomatlaşdyrylmagyny gazanmak, önümçiligiň netijeliligini ýokarlandyrmak, zähmeti tygşytlamak we önümçilik çykdajylaryny azaltmak.
3. Meýdanyň az bolmagy, ygtybarly öndürijilik, ýönekeý işlemek. Içgi, azyk, himiýa senagaty, lukmançylyk, awtoulag zapas şaýlary we beýleki pudaklarda giňden ulanylýar.
4. Customöriteleşdirilen ösüş we müşderini kanagatlandyrmak täzeliklere mätäç.

